Kyle Fazzari
on 31 May 2017
The Turtlebot 3 has launched
If you’re familiar with ROS (Robot Operating System), chances are you’re also familiar with the Turtlebot. The first version of the Turtlebot was created back in 2010 to serve as an inexpensive platform for learning ROS. This was followed in 2012 by the Turtlebot 2, which has since become the reference platform for learning ROS. We have a number of them here at Canonical, and we love them, although we have one issue with them: they’re just a tad too big. Taking them on a plane requires one to decide what one loves more, one’s belongings, or the Turtlebot, and to check the other.
At ROSCon last year, then, we were pleased to hear that OSRF and Robotis were introducing the Turtlebot 3, which is designed to address exactly this issue, in addition to significantly lowering the cost even compared to the inexpensive Turtlebot 2. Today marks the official launch of the Turtlebot 3, at ICRA 2017. There are two models, aptly named Burger and Waffle. You can guess which is which.
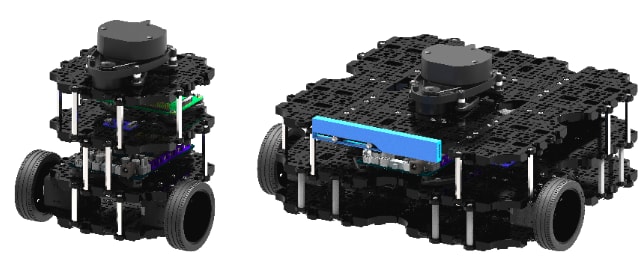
The Turtlebot 3 is open to its core: the designs can be 3D printed (if you so desire), and the embedded control board can be reprogrammed using the Arduino IDE. Both models in their default configuration ship with a 360-degree lidar (the Waffle also includes a RealSense), which means they’re perfect for learning and experimenting with simultaneous localisation and mapping (SLAM) and autonomous navigation. Not interested in SLAM? No problem, both of the models were developed to be modular: they can be reassembled into a number of different designs, so the possible uses are nearly infinite. They’re also both miniature: the Burger is run with a Raspberry Pi, and the Waffle with an Intel Joule.
Both the Pi and the Joule are reference platforms for Ubuntu Core, which means you can use either one of these designs as a launchpad to easily develop your prototype and take it to production using an OS that’s specifically designed for your use-case. It allows you to focus on what you do best, robotics, and takes care of the rest for you: security, transactional updates, and even an app store. If you need advice on doing exactly that, take a look at this blog (and video) series.
We can’t wait to get our hands on a Turtlebot 3.