

Gabriel Aguiar Noury
on 17 February 2023

We are happy to announce the release of our first e-training course for deploying ROS applications in The Construct. The Construct is the leading e-learning platform for ROS, helping engineers grow their robotics skills with a full-scale curriculum and hands-on courses. Working alongside The Construct engineering team will now make the course available to everyone.
Chapter 1 – Deploying ROS applications
This first unit of the course will be a hands-on session guided by Canonical’s robotics engineers. It will take us through the process of packaging our first ROS application as a snap. Snaps are the de facto distribution tool for companies deploying software on Ubuntu, like Microsoft, Google, Spotify and more. Snaps offer a solution to build and distribute containerised applications or any software. As such, we can leverage the same tooling and global infrastructure for our ROS applications.
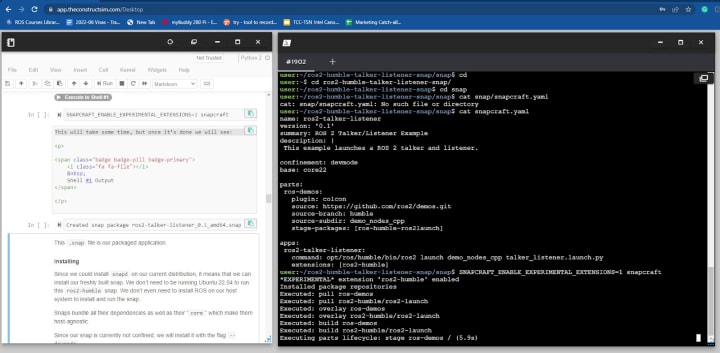
Across this course, we will explore how to build snaps for a robotics application. Through different examples, we will cover the basics of snap creation for ROS and ROS 2. By introducing the main concepts behind snaps, we will also see how to confine our robotics application and make it installable on dozens of Linux distributions.
More robotics and ROS courses to come
This first course is part of an ongoing series of training programmes dedicated to deploying and managing robotics software in Ubuntu. The series aims to help developers learn new skills and increase their knowledge about robotics DevOps in Ubuntu.
We will further improve our documentation and training programmes. This includes adding support for different languages and accessibility best practices.


